Category: Hardware
Control your LEDs with your TV remote?! || Arduino IR Tutorial
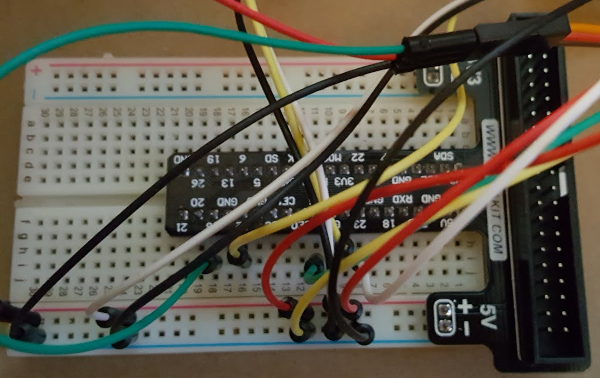
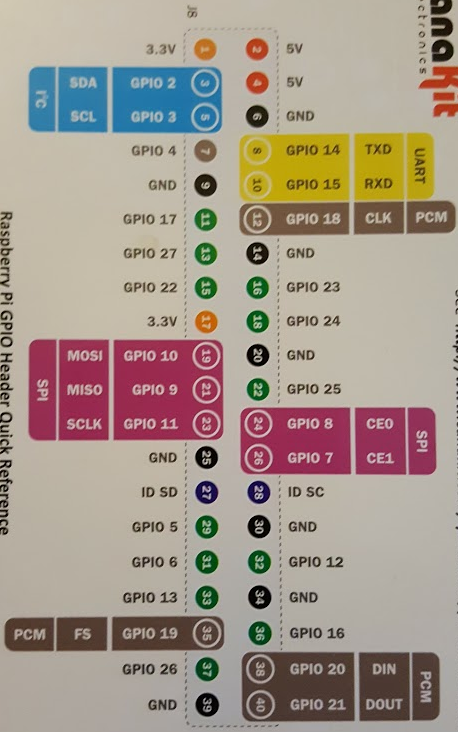
I created a [XamarinFormsIoT] Windows Core IoT project which can control LEDs and play sounds on a Raspberry PI 3 using C#/XAML. I used a portable dependency interface to expose the GPIO controller which only exists in the UWP project. GPIO is used to control the LEDs. I also ordered an IR receiver so I can detect IR signals from a remote and it works!

Next I need to [find] a UWP library for LIRC.
The [Arduino-IRremote] has a C++ library that can be converted to UWP.
I followed the idea from the video below.
[How to Control the GPIO on a Raspberry Pi with an IR Remote]
Adafruit: [IR (Infrared) Receiver Sensor]
[Raspberry Pis, Remotes & IR Receivers!]
[Play wav file in Raspberry PI with Windows IoT Core]
How do the Harry Potter interactive wands at Universal Studios in Orlando work?
Chirping Plush Owl Toy with Adafruit GEMMA
How does radiocarbon dating work?
Quantum compass
Hardware: Enermax Liqtech 120X Liquid CPU Cooler Review
ASUS NV 1080 STRIX Color Tool
The [AURA Color Tool] customizes the LED colors on the NV 1080.
How to use Mocap Data from Axis Neuron with 3DS Max Biped Rig
Hardware: ASUS X99A Motherboard
Motherboard: $229 ($30 rebate) [ASUS X99-A] [amazon] [newegg]
Memory: $119 CORSAIR Vengeance LPX 16GB (2 x 8GB) 288-Pin DDR4 2666 [amazon] [newegg]
Processor: $399 Intel Core i7-6800K Processor (3.60 GHz) [amazon] [newegg]
CPU Cooler: $41.99 [Cooler Master GeminII S524 Version 2 CPU Air Cooler with 5 Direct Contact Heat Pipes]
Power Supply: $144.99 [Corsair RMi Series, RM850i, 850 Watt (850W)]
Power Supply: $130.27 EVGA SuperNOVA 850W G3 [amazon] [newegg]
Case: $89.97 [DIYPC Skyline-07-R Black/Red SPCC ATX Full Tower]
Wireless Networking: $112.99 [ASUS 4×4 802.11AC Wireless-AC3100 PCIe] [amazon] [driver]
Harddrive: $259.99 WD Blue 1TB Internal SSD Solid State Drive [amazon] [newegg]
Graphics: $579.99 [ASUS GeForce GTX 1080 8GB ROG STRIX]
Mac: Hardware to old to update MacOS
Q: [This version of macOS 10.12 cannot be installed on this computer]
Apparently, my Macbook Pro (2009) is too old to update to the latest MacOS.
Hardware: A Beginner’s Guide to Water Cooling Your Computer
Raspberry PI 2 with Leap
The Leap Motion Controller requires ARM-9 or better and to make work with the Raspberry PI 2 I used a proxy HTTP server to work with the Raspberry PI 2. The Raspberry PI 2 controls servos based on the data from the leap. Each finger on the leap controls a different servo.
The project in action:
Details about the code:
The proxy sends JSON data for the finger rotations (in degrees).
{
"thumb": 27.815885630721692,
"index": 8.8111549114070726,
"middle": 16.216426372741033,
"ring": 29.267951404867844,
"pinky": 86.043786182477533
}
The script: `LeapServos.py`
#!/usr/bin/env python
import RPi.GPIO as GPIO
import datetime
import time
import urllib2
import threading
import json
servo_pin2 = 18
servo_pin3 = 22
# 60 degrees / 0.1seconds
servo_speed = 0.1
GPIO.setwarnings(False)
GPIO.setmode(GPIO.BOARD)
GPIO.setup(servo_pin2, GPIO.OUT)
GPIO.setup(servo_pin3, GPIO.OUT)
last_time = datetime.datetime.now()
current_time = datetime.datetime.now()
accuracy = 0.01
rotation1 = 90
rotation2 = 90
rotation3 = 90
rotation4 = 90
rotation5 = 90
timeRotation1 = 0
timeRotation2 = 0
timeRotation3 = 0
timeRotation4 = 0
timeRotation5 = 0
targetRotation1 = 90
targetRotation2 = 90
targetRotation3 = 90
targetRotation4 = 90
targetRotation5 = 90
pulse2 = GPIO.PWM(servo_pin2, 50)
pulse3 = GPIO.PWM(servo_pin3, 50)
logTime = datetime.datetime.now()
stayAlive = True
def getRotation(rotation):
if (rotation > 90.0):
return 180
if (rotation > 45.0):
return 90
else:
return 0
def newTarget():
global targetRotation1
global targetRotation2
global targetRotation3
global targetRotation4
global targetRotation5
while (stayAlive):
content = urllib2.urlopen("http://192.168.2.97").read()
#print (content)
jsonObject = json.loads(content)
#print (jsonObject)
#for key in jsonObject:
# print (key)
#print ("index: " + str(jsonObject["index"]))
targetRotation1 = getRotation(jsonObject["thumb"])
targetRotation2 = getRotation(jsonObject["index"])
targetRotation3 = getRotation(jsonObject["middle"])
targetRotation4 = getRotation(jsonObject["ring"])
targetRotation5 = getRotation(jsonObject["pinky"])
time.sleep(0)
print ("Thread complete.")
return
webThread = threading.Thread(target=newTarget, args=(), kwargs={})
webThread.start()
def log():
global logTime
global timeRotation2
global timeRotation3
global targetRotation2
global targetRotation3
if (logTime < datetime.datetime.now()):
logTime = datetime.datetime.now() + datetime.timedelta(0, 0.5)
#print "****"
#print ("2: TargetRotation: " + str(targetRotation2) + " Time: "+str(timeRotation2))
#print ("3: TargetRotation: " + str(targetRotation3) + " Time: "+str(timeRotation3))
return
def reset(pulse):
pulse.start(7.5);
pulse.ChangeDutyCycle(7.5)
time.sleep(0.5)
pulse.ChangeDutyCycle(0)
return
def compare(timeRotation, rotation, targetRotation):
global deltaTime
if (timeRotation >= 100):
return 0.25
elif (rotation == targetRotation):
if (timeRotation >= 0.0):
return timeRotation - deltaTime.total_seconds()
else:
return timeRotation;
else:
print "targetRotation changed."
return 100
def update(pulse, timeRotation, targetRotation):
cycle = 0
if (timeRotation >= 100):
cycle = 0
if (targetRotation == 90):
cycle = 7.5
elif (targetRotation == 0):
cycle = 2.5
else:
cycle = 12.5
print ("Cycle: "+str(cycle))
pulse.ChangeDutyCycle(cycle)
elif (timeRotation >= 0.0 and ((timeRotation - deltaTime.total_seconds()) <= 0.0)):
pulse.ChangeDutyCycle(0)
print ("Cycle: "+str(cycle))
return targetRotation
try:
reset(pulse2)
reset(pulse3)
time.sleep(1)
print "setup complete"
while True:
last_time = current_time
current_time = datetime.datetime.now()
deltaTime = current_time - last_time;
log()
timeRotation2 = compare(timeRotation2, rotation2, targetRotation2)
timeRotation3 = compare(timeRotation3, rotation3, targetRotation3)
rotation2 = update(pulse2, timeRotation2, targetRotation2);
rotation3 = update(pulse3, timeRotation3, targetRotation3);
time.sleep(0);
except KeyboardInterrupt:
print '\r\nProgram shutdown.'
stayAlive = False
time.sleep(1)
GPIO.cleanup();
print '\r\nProgam complete.'
Hardware: Tinker Board
[Asus takes on Raspberry Pi with 4K-capable Tinker Board]
The [Tinker Board] should start shipping in February, 2017.

Hardware: DIY Project Valerie: BUILD YOUR OWN 3 Screen Laptop!!
Hardware: Toshiba Satelitte
[Toshiba Satelitte S55t C5327 4K] (significantly faster)


[Toshiba Satelitte S55t C5222 HD] (much much slower)

![]()
NVIDIA GTX 1080
I’m trying to decide between an [ASUS GeForce GTX 1080 STRIX] and an [EVGA GeForce GTX 1080 SUPER CLOCKED].
Reviews are talking about the EVGA card [actually catching on fire] which has been acknowledged by EVGA.
Better use the temperature sensors and add really good ventilation.
I never had to worry about fire with my old cards…..
Ping – The World’s Smallest Global GPS Locator
NVIDIA GTX 1080 Benchmarks & Review
Hardware: Camera Board 360 Gooseneck Mount
[Camera Board 360 Gooseneck Mount] enables you to hold the Raspberry Pi camera in any position.

Hardware: Fish in Control
The fish controls where the fishtank rolls to.
Wingsuit + Donuts
ASUS P5N-D Motherboard Specifications
I didn’t realize my older desktop is 10 years old. That explains the power fault crashes…
[specs]
Old motherboard: [ASUS P5N-D Motherboard Specifications] [manual]
Old Graphics Card: [EVGA GeForce 9800 GT]
NVIDIA: [Min VR Specs]
The lowest end replacements have comments suggesting the card runs hot. 90F+
[EVGA GeForce GTX 1060 One Fan]
[EVGA GeForce GTX 1060 Two Fans]
[Blade Pro Equivalent With Component Prices]
Other desktop: [ASUS Rampage IV Extreme] [$]
Suggestions from Carl:
* [1GB SSD]
* [ASUS Sabertooth Z170-S] [$]
* [ASUS Sabertooth Z170-MARK-1] [$]
* [PC Part Picker]
Motherboard: Asus Rampage IV Extreme Drivers
Jasper Voice Control
[Jasper] is an open source platform for developing always-on, voice-controlled applications.