The Leap Motion Controller requires ARM-9 or better and to make work with the Raspberry PI 2 I used a proxy HTTP server to work with the Raspberry PI 2. The Raspberry PI 2 controls servos based on the data from the leap. Each finger on the leap controls a different servo.
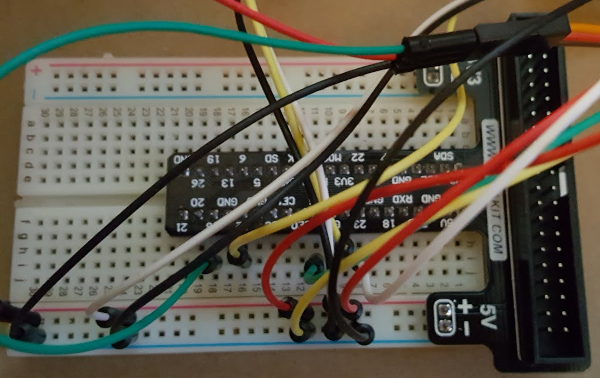
The project in action:
Details about the code:
The proxy sends JSON data for the finger rotations (in degrees).
{
"thumb": 27.815885630721692,
"index": 8.8111549114070726,
"middle": 16.216426372741033,
"ring": 29.267951404867844,
"pinky": 86.043786182477533
}
The script: `LeapServos.py`
#!/usr/bin/env python
import RPi.GPIO as GPIO
import datetime
import time
import urllib2
import threading
import json
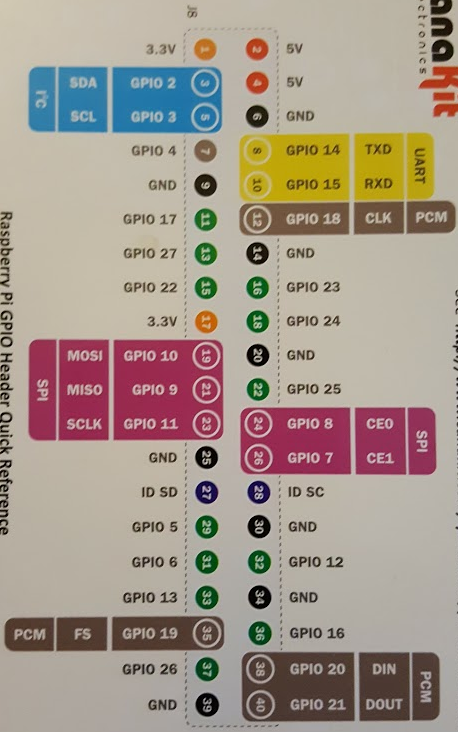
servo_pin2 = 18
servo_pin3 = 22
# 60 degrees / 0.1seconds
servo_speed = 0.1
GPIO.setwarnings(False)
GPIO.setmode(GPIO.BOARD)
GPIO.setup(servo_pin2, GPIO.OUT)
GPIO.setup(servo_pin3, GPIO.OUT)
last_time = datetime.datetime.now()
current_time = datetime.datetime.now()
accuracy = 0.01
rotation1 = 90
rotation2 = 90
rotation3 = 90
rotation4 = 90
rotation5 = 90
timeRotation1 = 0
timeRotation2 = 0
timeRotation3 = 0
timeRotation4 = 0
timeRotation5 = 0
targetRotation1 = 90
targetRotation2 = 90
targetRotation3 = 90
targetRotation4 = 90
targetRotation5 = 90
pulse2 = GPIO.PWM(servo_pin2, 50)
pulse3 = GPIO.PWM(servo_pin3, 50)
logTime = datetime.datetime.now()
stayAlive = True
def getRotation(rotation):
if (rotation > 90.0):
return 180
if (rotation > 45.0):
return 90
else:
return 0
def newTarget():
global targetRotation1
global targetRotation2
global targetRotation3
global targetRotation4
global targetRotation5
while (stayAlive):
content = urllib2.urlopen("http://192.168.2.97").read()
#print (content)
jsonObject = json.loads(content)
#print (jsonObject)
#for key in jsonObject:
# print (key)
#print ("index: " + str(jsonObject["index"]))
targetRotation1 = getRotation(jsonObject["thumb"])
targetRotation2 = getRotation(jsonObject["index"])
targetRotation3 = getRotation(jsonObject["middle"])
targetRotation4 = getRotation(jsonObject["ring"])
targetRotation5 = getRotation(jsonObject["pinky"])
time.sleep(0)
print ("Thread complete.")
return
webThread = threading.Thread(target=newTarget, args=(), kwargs={})
webThread.start()
def log():
global logTime
global timeRotation2
global timeRotation3
global targetRotation2
global targetRotation3
if (logTime < datetime.datetime.now()):
logTime = datetime.datetime.now() + datetime.timedelta(0, 0.5)
#print "****"
#print ("2: TargetRotation: " + str(targetRotation2) + " Time: "+str(timeRotation2))
#print ("3: TargetRotation: " + str(targetRotation3) + " Time: "+str(timeRotation3))
return
def reset(pulse):
pulse.start(7.5);
pulse.ChangeDutyCycle(7.5)
time.sleep(0.5)
pulse.ChangeDutyCycle(0)
return
def compare(timeRotation, rotation, targetRotation):
global deltaTime
if (timeRotation >= 100):
return 0.25
elif (rotation == targetRotation):
if (timeRotation >= 0.0):
return timeRotation - deltaTime.total_seconds()
else:
return timeRotation;
else:
print "targetRotation changed."
return 100
def update(pulse, timeRotation, targetRotation):
cycle = 0
if (timeRotation >= 100):
cycle = 0
if (targetRotation == 90):
cycle = 7.5
elif (targetRotation == 0):
cycle = 2.5
else:
cycle = 12.5
print ("Cycle: "+str(cycle))
pulse.ChangeDutyCycle(cycle)
elif (timeRotation >= 0.0 and ((timeRotation - deltaTime.total_seconds()) <= 0.0)):
pulse.ChangeDutyCycle(0)
print ("Cycle: "+str(cycle))
return targetRotation
try:
reset(pulse2)
reset(pulse3)
time.sleep(1)
print "setup complete"
while True:
last_time = current_time
current_time = datetime.datetime.now()
deltaTime = current_time - last_time;
log()
timeRotation2 = compare(timeRotation2, rotation2, targetRotation2)
timeRotation3 = compare(timeRotation3, rotation3, targetRotation3)
rotation2 = update(pulse2, timeRotation2, targetRotation2);
rotation3 = update(pulse3, timeRotation3, targetRotation3);
time.sleep(0);
except KeyboardInterrupt:
print '\r\nProgram shutdown.'
stayAlive = False
time.sleep(1)
GPIO.cleanup();
print '\r\nProgam complete.'
Comments are closed.