Category: Drone
Drone Flight #6

Flight #6 is been the highest flight I’ve done yet. My hands were shaking from the cold or the fear, “don’t lose this one!”. Also those LEDs turn RED as the A23 battery voltage current drops. I might go with single color LEDs (not the RGB kind) so they stay the same color.
For the next flight, I’ll want to aim towards the mountains.
Devin Flight #1

PixHawk Drone Flight #4
PixHawk Drone Flight #3
Drone A23 LEDs


PixHawk Drone Flight #2
Tech Explorations™ Make an Open Source Drone: More Fun
Drone 2
[Full Drone Part List]
[$13.99 F450 Frame]
Landing Gear: [$7.75 black] [$6.99 white]
[$12.98 Zip Ties]
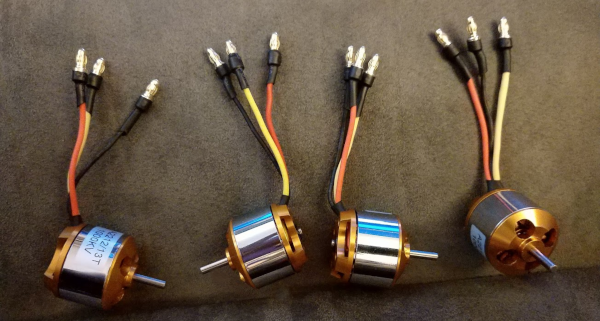
4 X Motors/ESCs: [$5.83 each] or [$9.96 each]
[$7.99 for 20 X ESC Bullet Connectors]
Flight Controller: [$127.98 Pixhawk]
[$7.95 Better GPS bracket]
Receiver: [iA6B Receiver] or [Transmitter/Receiver]
Battery: [$91.70 Venom 5000 mah]
Camera: [$70 GoPro HERO3]
LEDs: [$10.49 for 4 X RGB Leds]
LED Power: [$4.19 for 2 X 12V A23 Batteries]
Tutorial: [Modify ESC wires]
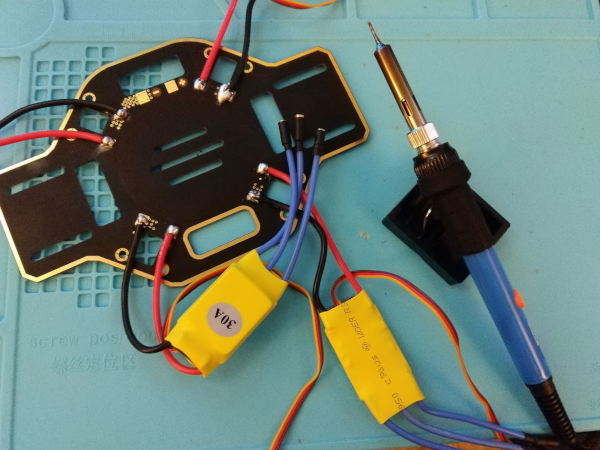
Tutorial: [Connect ESCs to power distribution board]
Tutorial: [Setup Battery Connection]
Tutorial: [Pixhawk Wiring]

[$13.99 F450 Frame]
Landing Gear: [$7.75 black] [$6.99 white]
[$12.98 Zip Ties]
4 X Motors/ESCs: [$5.83 each] or [$9.96 each]
[$7.99 for 20 X ESC Bullet Connectors]
Flight Controller: [$127.98 Pixhawk]
[$7.95 Better GPS bracket]
Receiver: [iA6B Receiver] or [Transmitter/Receiver]
Battery: [$91.70 Venom 5000 mah]
Camera: [$70 GoPro HERO3]
LEDs: [$10.49 for 4 X RGB Leds]
LED Power: [$4.19 for 2 X 12V A23 Batteries]
Setup:
Tutorial: [Attach ESC wires]Tutorial: [Modify ESC wires]
Tutorial: [Connect ESCs to power distribution board]
Tutorial: [Setup Battery Connection]
Tutorial: [Pixhawk Wiring]
My PixHawk F450 Frame Initial Flight
Pixhawk Drone arming
[Hobbypower Pixhawk PX4 Flight Controller]
[HKPilot32 Flight Controller] [products]
Arming is failing and I’m down to these messages.
PreArm: Logging failed Frame: QUAD fmuv2 002A0037 3337510B 32343735 ChibiOS: ff603d11 ArduCopter V3.6.3 (63eb66fe) PreArm: Logging failed u-blox 1 HW: 00080000 SW: ROM CORE 3.01 (107888) PreArm: Logging failed PreArm: Hardware safety switch EKF2 IMU1 tilt alignment complete EKF2 IMU0 tilt alignment complete EKF2 IMU1 initial yaw alignment complete EKF2 IMU0 initial yaw alignment complete GPS 1: detected as u-blox at 115200 baud Frame: QUAD fmuv2 002A0037 3337510B 32343735 ChibiOS: ff603d11 ArduCopter V3.6.3 (63eb66fe) Barometer calibration complete Initialising APMThere’s an arm check for logging that had to be disabled. Now arming works.
Drone: Connect GPS on Pixhawk
Drone: Calibrate the ESCs
Drone: Calibration and Test Flight – Pixhawk Driver
Drone Kit
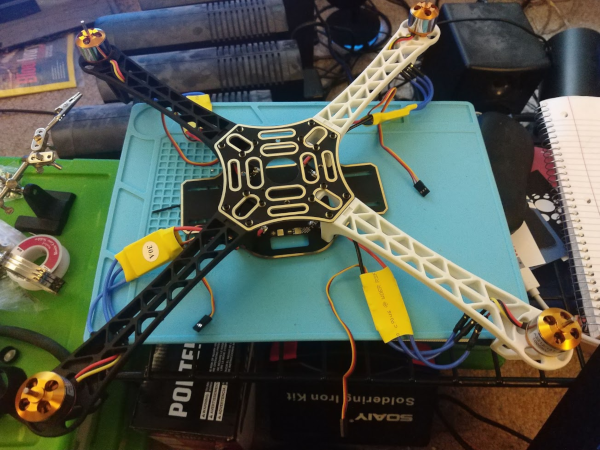
Frame: [F450 Drone Frame]
Motor: A2212 1000KV w30A Motor Brushless ESC + 1045 Propeller: [4] [2]
Flight Controller: [Pixhawk]
Software: [Mission Planner] [Drivers] [Setup Signing] [disable]
Battery: [Turnigy 4000mAh 30~40C LIPO]
Remember to always charge the LIPO battery under supervision. Never store a charged LIPO battery.